" height="9.18705px" id="AiyYyR90G" transform="translate(3.406 3.406)" width="9.18685px"/></svg>)
" height="1.90314px" id="wtDTm6bEW" transform="translate(26.225 0)" width="2.4723000000000006px"/><path d="M 0.557 0 L 1.438 0 C 1.746 0 1.995 0.25 1.995 0.559 L 1.995 1.344 C 1.995 1.653 1.746 1.903 1.438 1.903 L 0.557 1.903 C 0.25 1.903 0 1.653 0 1.344 L 0 0.559 C 0 0.25 0.25 0 0.557 0 Z" fill="rgb(29, 28, 27)" height="1.9031500000000001px" id="GnmDnNra_" transform="translate(36.408 2.728)" width="1.9953000000000003px"/><path d="M 6.224 0 L 0.558 0 C 0.25 0 0 0.25 0 0.559 L 0 1.344 C 0 1.653 0.25 1.903 0.558 1.903 L 6.224 1.903 C 6.531 1.903 6.781 1.653 6.781 1.344 L 6.781 0.559 C 6.781 0.25 6.531 0 6.224 0 Z" fill="rgb(29, 28, 27)" height="1.9031500000000001px" id="hKTQ3dbw4" transform="translate(34.261 5.456)" width="6.781100000000002px"/><path d="M 6.955 0 L 0.558 0 C 0.25 0 0 0.25 0 0.559 L 0 1.344 C 0 1.653 0.25 1.903 0.558 1.903 L 6.955 1.903 C 7.263 1.903 7.513 1.653 7.513 1.344 L 7.513 0.559 C 7.513 0.25 7.263 0 6.955 0 Z" fill="rgb(29, 28, 27)" height="1.9031500000000001px" id="G1Zzk9CUU" transform="translate(28.298 8.243)" width="7.513100000000001px"/><path d="M 7.123 0 L 0.558 0 C 0.25 0 0 0.25 0 0.559 L 0 1.344 C 0 1.653 0.25 1.903 0.558 1.903 L 7.123 1.903 C 7.431 1.903 7.681 1.653 7.681 1.344 L 7.681 0.559 C 7.681 0.25 7.431 0 7.123 0 Z" fill="rgb(29, 28, 27)" height="1.9030999999999985px" id="fm7cHxIfJ" transform="translate(0 10.972)" width="7.68067px"/><path d="M 13.447 0 L 0.558 0 C 0.25 0 0 0.25 0 0.559 L 0 1.344 C 0 1.653 0.25 1.903 0.558 1.903 L 13.447 1.903 C 13.755 1.903 14.004 1.653 14.004 1.344 L 14.004 0.559 C 14.004 0.25 13.755 0 13.447 0 Z" fill="rgb(29, 28, 27)" height="1.9030999999999985px" id="LowSwDrtg" transform="translate(9.552 10.972)" width="14.0044px"/><path d="M 0.558 0 L 8.212 0 C 8.52 0 8.77 0.25 8.77 0.559 L 8.77 1.344 C 8.77 1.653 8.52 1.903 8.212 1.903 L 0.558 1.903 C 0.25 1.903 0 1.653 0 1.344 L 0 0.559 C 0 0.25 0.25 0 0.558 0 Z" fill="rgb(29, 28, 27)" height="1.9030999999999985px" id="xRiKc2od7" transform="translate(27.041 10.972)" width="8.769900000000003px"/><path d="M 0.557 0 L 5.4 0 C 5.708 0 5.958 0.25 5.958 0.559 L 5.958 1.344 C 5.958 1.653 5.708 1.903 5.4 1.903 L 0.557 1.903 C 0.25 1.903 0 1.653 0 1.344 L 0 0.559 C 0 0.25 0.25 0 0.557 0 Z" fill="rgb(29, 28, 27)" height="1.9031500000000001px" id="JWdNVicde" transform="translate(36.796 8.243)" width="5.957599999999999px"/><path d="M 1.438 0 L 0.558 0 C 0.25 0 0 0.25 0 0.559 L 0 1.344 C 0 1.653 0.25 1.903 0.558 1.903 L 1.438 1.903 C 1.746 1.903 1.995 1.653 1.995 1.344 L 1.995 0.559 C 1.995 0.25 1.746 0 1.438 0 Z" fill="rgb(29, 28, 27)" height="1.9031500000000001px" id="RfFYVCT_T" transform="translate(28.717 5.456)" width="1.9953000000000003px"/><path d="M 0.558 0 L 2.895 0 C 3.203 0 3.453 0.25 3.453 0.559 L 3.453 1.406 C 3.453 1.714 3.203 1.964 2.895 1.964 L 0.558 1.964 C 0.25 1.964 0 1.714 0 1.406 L 0 0.559 C 0 0.25 0.25 0 0.558 0 Z" fill="rgb(29, 28, 27)" height="1.964299999999998px" id="dngJ6MU2p" transform="translate(16.183 24.582)" width="3.4525000000000006px"/><path d="M 1.706 0 L 0.558 0 C 0.25 0 0 0.25 0 0.559 L 0 1.406 C 0 1.714 0.25 1.964 0.558 1.964 L 1.706 1.964 C 2.014 1.964 2.263 1.714 2.263 1.406 L 2.263 0.559 C 2.263 0.25 2.014 0 1.706 0 Z" fill="rgb(29, 28, 27)" height="1.964299999999998px" id="N_fstvKmR" transform="translate(22.18 24.582)" width="2.2631999999999977px"/><path d="M 0.558 0 L 5.544 0 C 5.852 0 6.101 0.25 6.101 0.559 L 6.101 1.406 C 6.101 1.714 5.852 1.964 5.544 1.964 L 0.558 1.964 C 0.25 1.964 0 1.714 0 1.406 L 0 0.559 C 0 0.25 0.25 0 0.558 0 Z" fill="rgb(29, 28, 27)" height="1.964299999999998px" id="t55XLYcgb" transform="translate(25.486 24.582)" width="6.101399999999998px"/><path d="M 1.976 0 L 0.558 0 C 0.25 0 0 0.25 0 0.559 L 0 1.406 C 0 1.714 0.25 1.964 0.558 1.964 L 1.976 1.964 C 2.284 1.964 2.533 1.714 2.533 1.406 L 2.533 0.559 C 2.533 0.25 2.284 0 1.976 0 Z" fill="rgb(29, 28, 27)" height="1.964299999999998px" id="ZrEKTVTAe" transform="translate(28.542 21.854)" width="2.5334000000000003px"/><path d="M 0.557 0 L 1.438 0 C 1.746 0 1.995 0.25 1.995 0.559 L 1.995 1.406 C 1.995 1.714 1.746 1.964 1.438 1.964 L 0.557 1.964 C 0.25 1.964 0 1.714 0 1.406 L 0 0.559 C 0 0.25 0.25 0 0.557 0 Z" fill="rgb(29, 28, 27)" height="1.964299999999998px" id="Z0fPTp9aR" transform="translate(11.425 24.582)" width="1.9953000000000003px"/><path d="M 0 0.559 C 0 0.251 0.251 0 0.558 0 L 1.438 0 C 1.745 0 1.995 0.251 1.995 0.559 L 1.995 1.405 C 1.995 1.713 1.745 1.964 1.438 1.964 L 0.558 1.964 C 0.251 1.964 0 1.713 0 1.405 Z" fill="rgb(29, 28, 27)" height="1.964299999999998px" id="Tj_PDHFDh" transform="translate(20.635 27.308)" width="1.9954px"/><path d="M 0.557 0 L 1.342 0 C 1.65 0 1.899 0.25 1.899 0.559 L 1.899 1.406 C 1.899 1.714 1.65 1.964 1.342 1.964 L 0.557 1.964 C 0.25 1.964 0 1.714 0 1.406 L 0 0.559 C 0 0.25 0.25 0 0.557 0 Z" fill="rgb(29, 28, 27)" height="1.9643000000000015px" id="AYq9dXkKz" transform="translate(18.686 30.036)" width="1.8994px"/><path d="M 0.558 0 L 5.768 0 C 6.076 0 6.326 0.25 6.326 0.559 L 6.326 1.344 C 6.326 1.653 6.076 1.903 5.768 1.903 L 0.558 1.903 C 0.25 1.903 0 1.653 0 1.344 L 0 0.559 C 0 0.25 0.25 0 0.558 0 Z" fill="rgb(29, 28, 27)" height="1.9031500000000001px" id="rspevfJcx" transform="translate(12.157 8.243)" width="6.325900000000001px"/><path d="M 3.285 0 L 0.558 0 C 0.25 0 0 0.25 0 0.559 L 0 1.344 C 0 1.653 0.25 1.903 0.558 1.903 L 3.285 1.903 C 3.593 1.903 3.842 1.653 3.842 1.344 L 3.842 0.559 C 3.842 0.25 3.593 0 3.285 0 Z" fill="rgb(29, 28, 27)" height="1.9031500000000001px" id="XRUAhGnph" transform="translate(23.887 2.728)" width="3.8424000000000014px"/><path d="M 0.558 0 L 5.644 0 C 5.952 0 6.202 0.25 6.202 0.559 L 6.202 1.344 C 6.202 1.653 5.952 1.903 5.644 1.903 L 0.558 1.903 C 0.25 1.903 0 1.653 0 1.344 L 0 0.559 C 0 0.25 0.25 0 0.558 0 Z" fill="rgb(29, 28, 27)" height="1.9031500000000001px" id="VsaVVIfke" transform="translate(21.528 5.456)" width="6.201600000000003px"/><path d="M 3.06 0 L 0.558 0 C 0.25 0 0 0.25 0 0.559 L 0 1.344 C 0 1.653 0.25 1.903 0.558 1.903 L 3.06 1.903 C 3.369 1.903 3.618 1.653 3.618 1.344 L 3.618 0.559 C 3.618 0.25 3.369 0 3.06 0 Z" fill="rgb(29, 28, 27)" height="1.9030999999999985px" id="wiAKEgyId" transform="translate(40.819 10.972)" width="3.6182000000000016px"/><path d="M 0.558 0 L 17.318 0 C 17.626 0 17.875 0.25 17.875 0.559 L 17.875 1.345 C 17.875 1.653 17.626 1.903 17.318 1.903 L 0.558 1.903 C 0.25 1.903 0 1.653 0 1.345 L 0 0.559 C 0 0.25 0.25 0 0.558 0 Z" fill="rgb(29, 28, 27)" height="1.9032px" id="FIE0ufK9m" transform="translate(6.666 13.7)" width="17.87506px"/><path d="M 6.426 0 L 0.558 0 C 0.25 0 0 0.25 0 0.559 L 0 1.345 C 0 1.653 0.25 1.903 0.558 1.903 L 6.426 1.903 C 6.734 1.903 6.984 1.653 6.984 1.345 L 6.984 0.559 C 6.984 0.25 6.734 0 6.426 0 Z" fill="rgb(29, 28, 27)" height="1.9032000000000018px" id="ut9UWny3L" transform="translate(22.892 19.156)" width="6.983599999999999px"/><path d="M 0.558 0 L 22.151 0 C 22.459 0 22.709 0.25 22.709 0.559 L 22.709 1.344 C 22.709 1.653 22.459 1.903 22.151 1.903 L 0.558 1.903 C 0.25 1.903 0 1.653 0 1.344 L 0 0.559 C 0 0.25 0.25 0 0.558 0 Z" fill="rgb(29, 28, 27)" height="1.9030999999999985px" id="VULnffgbk" transform="translate(9.552 16.428)" width="22.7089px"/><path d="M 7.886 0 L 0.558 0 C 0.25 0 0 0.25 0 0.559 L 0 1.345 C 0 1.653 0.25 1.903 0.558 1.903 L 7.886 1.903 C 8.194 1.903 8.443 1.653 8.443 1.345 L 8.443 0.559 C 8.443 0.25 8.194 0 7.886 0 Z" fill="rgb(29, 28, 27)" height="1.9032000000000018px" id="adZTYr4MR" transform="translate(6.078 19.156)" width="8.44303px"/><path d="M 0.558 0 L 2.211 0 C 2.519 0 2.769 0.25 2.769 0.559 L 2.769 1.406 C 2.769 1.714 2.519 1.964 2.211 1.964 L 0.558 1.964 C 0.25 1.964 0 1.714 0 1.406 L 0 0.559 C 0 0.25 0.25 0 0.558 0 Z" fill="rgb(29, 28, 27)" height="1.964299999999998px" id="bwdUdEmCH" transform="translate(13.784 21.854)" width="2.768600000000001px"/><path d="M 2.424 0 L 0.558 0 C 0.25 0 0 0.25 0 0.559 L 0 1.406 C 0 1.714 0.25 1.964 0.558 1.964 L 2.424 1.964 C 2.732 1.964 2.982 1.714 2.982 1.406 L 2.982 0.559 C 2.982 0.25 2.732 0 2.424 0 Z" fill="rgb(29, 28, 27)" height="1.964299999999998px" id="PUvesMJEj" transform="translate(23.556 21.854)" width="2.982199999999999px"/><path d="M 0.558 0 L 2.241 0 C 2.55 0 2.799 0.25 2.799 0.559 L 2.799 1.406 C 2.799 1.714 2.55 1.964 2.241 1.964 L 0.558 1.964 C 0.25 1.964 0 1.714 0 1.406 L 0 0.559 C 0 0.25 0.25 0 0.558 0 Z" fill="rgb(29, 28, 27)" height="1.964299999999998px" id="Wo2W7J3Zj" transform="translate(8.672 21.854)" width="2.799050000000001px"/><path d="M 6.661 0 L 0.558 0 C 0.25 0 0 0.25 0 0.559 L 0 1.345 C 0 1.653 0.25 1.903 0.558 1.903 L 6.661 1.903 C 6.969 1.903 7.219 1.653 7.219 1.345 L 7.219 0.559 C 7.219 0.25 6.969 0 6.661 0 Z" fill="rgb(29, 28, 27)" height="1.9032px" id="PpPVZXp9j" transform="translate(27.041 13.7)" width="7.218900000000001px"/><path d="M 0.621 1.905 C 0.218 1.905 0 1.687 0 1.283 L 0 0.622 C 0 0.218 0.218 0 0.621 0 L 11.225 0 C 11.628 0 11.846 0.218 11.846 0.622 L 11.846 1.283 C 11.846 1.687 11.628 1.905 11.225 1.905 L 6.934 1.905 L 6.934 14.926 C 6.934 15.33 6.716 15.548 6.313 15.548 L 5.537 15.548 C 5.134 15.548 4.916 15.33 4.916 14.926 L 4.916 1.905 Z" fill="rgb(29, 28, 27)" height="15.54825px" id="xr32fxeO6" transform="translate(52.177 8.243)" width="11.845599999999997px"/><path d="M 0.621 0 C 0.218 0 0 0.218 0 0.622 L 0 14.924 C 0 15.328 0.218 15.546 0.621 15.546 L 1.357 15.546 C 1.76 15.546 1.978 15.328 1.978 14.924 L 1.978 0.622 C 1.978 0.218 1.76 0 1.357 0 Z" fill="rgb(29, 28, 27)" height="15.546050000000001px" id="oSsO_UPVN" transform="translate(90.476 8.243)" width="1.9779000000000053px"/><path d="M 0.62 15.546 C 0.217 15.546 0 15.328 0 14.924 L 0 0.622 C 0 0.218 0.217 0 0.62 0 L 1.396 0 C 1.799 0 2.017 0.218 2.017 0.622 L 2.017 13.632 L 8.981 13.632 C 9.384 13.632 9.602 13.85 9.602 14.254 L 9.602 14.924 C 9.602 15.328 9.384 15.546 8.981 15.546 Z" fill="rgb(29, 28, 27)" height="15.546050000000001px" id="Sgj4z5osO" transform="translate(116.749 8.243)" width="9.602000000000004px"/><path d="M 1.974 14.924 C 1.974 15.328 1.756 15.546 1.353 15.546 L 0.621 15.546 C 0.218 15.546 0 15.328 0 14.924 L 0 0.622 C 0 0.218 0.218 0 0.621 0 L 1.357 0 C 1.76 0 1.978 0.218 1.978 0.622 L 1.978 5.747 C 2.634 4.721 3.806 4.079 5.309 4.079 C 8.18 4.079 10.356 6.358 10.356 9.948 C 10.356 13.538 8.18 15.817 5.309 15.817 C 3.801 15.817 2.627 15.175 1.971 14.145 L 1.971 14.922 Z M 8.36 9.95 C 8.36 7.362 6.881 5.928 5.121 5.928 C 3.361 5.928 1.863 7.362 1.863 9.95 C 1.863 12.539 3.361 13.972 5.121 13.972 C 6.881 13.972 8.36 12.539 8.36 9.95 Z" fill="rgb(29, 28, 27)" height="15.81665px" id="q13jjj7xd" transform="translate(138.401 8.243)" width="10.355999999999995px"/><path d="M 4.457 11.738 C 0.961 11.738 -0.019 9.872 0 8.318 C 0.005 7.929 0.253 7.735 0.645 7.735 L 1.344 7.735 C 1.748 7.735 1.922 7.949 1.961 8.352 C 2.063 9.315 2.693 9.907 4.433 9.907 C 6.174 9.907 7.012 9.269 7.012 8.289 C 7.012 7.425 6.522 7.108 5.305 6.899 L 3.209 6.539 C 1.453 6.238 0.29 5.247 0.29 3.468 C 0.29 1.467 1.774 0 4.518 0 C 7.263 0 8.838 1.491 8.814 3.23 C 8.81 3.614 8.553 3.808 8.165 3.808 L 7.457 3.808 C 7.054 3.808 6.908 3.595 6.851 3.202 C 6.749 2.477 6.159 1.818 4.518 1.818 C 2.878 1.818 2.249 2.508 2.249 3.403 C 2.249 4.175 2.695 4.516 3.81 4.714 L 5.906 5.083 C 7.72 5.404 8.98 6.292 8.98 8.198 C 8.98 9.976 7.908 11.74 4.455 11.74 Z" fill="rgb(29, 28, 27)" height="11.739799999999999px" id="tJ8syeWTW" transform="translate(150.024 12.325)" width="8.980269730401375px"/><path d="M 9.146 7.997 C 9.146 8.813 9.175 9.983 9.282 10.799 C 9.334 11.223 9.155 11.465 8.728 11.465 L 8.068 11.465 C 7.685 11.465 7.467 11.319 7.428 11.022 L 7.317 10.181 C 6.724 11.157 5.565 11.659 4.145 11.659 C 1.579 11.659 0 10.142 0 8.078 C 0 6.27 1.27 5.157 3.433 5.002 L 6.589 4.78 C 7.162 4.741 7.186 4.688 7.186 4.153 L 7.186 3.682 C 7.186 2.438 6.434 1.807 4.79 1.807 C 3.145 1.807 2.472 2.425 2.405 3.289 C 2.376 3.697 2.235 3.916 1.823 3.916 L 1.067 3.916 C 0.675 3.916 0.427 3.717 0.422 3.328 C 0.407 1.51 1.74 0 4.792 0 C 7.798 0 9.162 1.427 9.155 3.736 Z M 7.188 7.298 L 7.188 6.244 C 6.955 6.327 6.678 6.386 6.363 6.415 L 3.598 6.676 C 2.59 6.775 1.997 7.163 1.997 8.099 L 1.999 8.099 C 1.999 9.188 2.886 9.97 4.4 9.97 C 6.169 9.97 7.188 8.9 7.188 7.298 Z" fill="rgb(29, 28, 27)" height="11.658999999999999px" id="QPESIZvku" transform="translate(126.854 12.325)" width="9.290755130109668px"/><path d="M 5.224 0 C 8.313 0 10.295 2.255 10.295 5.456 L 10.295 5.694 C 10.295 6.098 10.077 6.316 9.674 6.316 L 1.998 6.316 C 2.168 8.547 3.447 9.898 5.407 9.898 C 6.768 9.898 7.598 9.363 7.934 8.431 C 8.06 8.078 8.243 7.892 8.618 7.892 L 9.33 7.892 C 9.746 7.892 9.994 8.125 9.923 8.538 C 9.598 10.433 7.834 11.74 5.409 11.74 L 5.407 11.738 C 2.168 11.738 0 9.424 0 5.797 C 0 2.169 2.135 0 5.224 0 Z M 5.222 1.74 C 3.494 1.74 2.405 2.818 2.074 4.64 L 8.282 4.64 C 8.054 2.842 6.949 1.74 5.222 1.74 Z" fill="rgb(29, 28, 27)" height="11.739799999999999px" id="PKmyQkwJE" transform="translate(104.541 12.325)" width="10.295000000000002px"/><path d="M 4.459 11.194 C 4.099 11.194 3.877 11.039 3.746 10.703 L 0.091 1.021 C -0.024 0.72 -0.031 0.511 0.076 0.297 C 0.178 0.094 0.381 0 0.732 0 L 1.274 0 C 1.633 0 1.86 0.155 1.986 0.495 L 4.958 8.503 L 5.123 9.018 L 5.289 8.503 L 8.262 0.495 C 8.388 0.155 8.615 0 8.974 0 L 9.517 0 C 9.865 0 10.07 0.092 10.172 0.297 C 10.279 0.511 10.275 0.72 10.157 1.021 L 6.502 10.703 C 6.371 11.039 6.149 11.194 5.79 11.194 Z" fill="rgb(29, 28, 27)" height="11.1941px" id="uUQr5Yl4B" transform="translate(93.807 12.595)" width="10.248961642504256px"/><path d="M 5.407 11.738 C 2.167 11.738 0 9.424 0 5.797 C 0 2.169 2.133 0 5.221 0 C 8.31 0 10.292 2.255 10.292 5.456 L 10.292 5.694 C 10.292 6.098 10.075 6.316 9.672 6.316 L 1.995 6.316 C 2.165 8.547 3.446 9.898 5.404 9.898 C 6.768 9.898 7.596 9.363 7.931 8.431 C 8.058 8.078 8.241 7.892 8.615 7.892 L 9.328 7.892 C 9.744 7.892 9.992 8.125 9.918 8.538 C 9.593 10.433 7.829 11.74 5.404 11.74 Z M 8.282 4.64 C 8.053 2.842 6.949 1.74 5.221 1.74 C 3.494 1.74 2.405 2.818 2.074 4.64 Z" fill="rgb(29, 28, 27)" height="11.739799999999999px" id="zo1nSBuSF" transform="translate(78.397 12.325)" width="10.29249999999999px"/><path d="M 3.057 10.677 C 3.163 11.026 3.392 11.192 3.756 11.192 L 3.749 11.194 L 4.987 11.194 C 5.35 11.194 5.579 11.028 5.69 10.679 L 8.173 2.654 L 8.237 2.401 L 8.3 2.654 L 10.787 10.679 C 10.894 11.028 11.123 11.194 11.487 11.194 L 12.733 11.194 C 13.096 11.194 13.325 11.028 13.432 10.679 L 16.418 1.006 C 16.516 0.7 16.512 0.498 16.41 0.288 C 16.307 0.089 16.109 0.002 15.76 0.002 L 15.218 0.002 C 14.848 0.002 14.626 0.168 14.519 0.522 L 12.094 8.547 L 12.046 8.761 L 11.999 8.542 L 9.506 0.517 C 9.4 0.168 9.171 0.002 8.807 0.002 L 7.683 0.002 C 7.319 0.002 7.091 0.168 6.984 0.517 L 4.492 8.542 L 4.449 8.745 L 4.405 8.551 L 1.98 0.519 C 1.874 0.166 1.649 0 1.281 0 L 0.728 0 C 0.38 0 0.181 0.087 0.079 0.286 C -0.021 0.493 -0.028 0.698 0.07 1.004 Z" fill="rgb(29, 28, 27)" height="11.194099999999999px" id="uboloLX99" transform="translate(61.282 12.598)" width="16.489163442184434px"/></svg>)
Product
Video vs Text for Public Sector: A Video-Native Case For Spatio-Temporal Reasoning with Marengo and Pegasus

Mike Mascari
General-purpose LLMs fail on mission video because frame sampling destroys temporal context and language priors override visual evidence, while Twelve Labs' Marengo and Pegasus address this by separating video retrieval from reasoning to produce time-anchored, auditable intelligence products for DoD and Intelligence Community workloads.
General-purpose LLMs fail on mission video because frame sampling destroys temporal context and language priors override visual evidence, while Twelve Labs' Marengo and Pegasus address this by separating video retrieval from reasoning to produce time-anchored, auditable intelligence products for DoD and Intelligence Community workloads.

In this article
Join our newsletter
Join our newsletter
Receive the latest advancements, tutorials, and industry insights in video understanding
Receive the latest advancements, tutorials, and industry insights in video understanding
Search, analyze, and explore your videos with AI.
Mar 24, 2026
12 Minutes
Copy link to article
Video is not text. It’s a timeline.
If you work in DoD or the Intelligence Community, you already know the uncomfortable truth: we are collecting more video than humans can watch.
ISR platforms, wide-area sensors, fixed cameras, body-worn cameras, drones; everything is becoming a video stream. And the hard part isn’t collecting the footage; it’s turning raw motion imagery into timely, trustworthy intelligence products.
Public reports have described this as an “information deluge” in military intelligence, where analysts risk becoming overwhelmed by the scale of modern collection.
So it’s natural that teams ask: “Can we just put this video into an LLM?”
Sometimes you can get a decent answer for a short clip. But for mission workloads including hours of footage, multiple feeds, real timeline questions (“what happened before/after?”, “who interacted with whom?”, “what changed?”), general-purpose LLMs fail in predictable ways.
And the reason is simple: Text is a sequence of tokens. Video is a spatiotemporal signal.
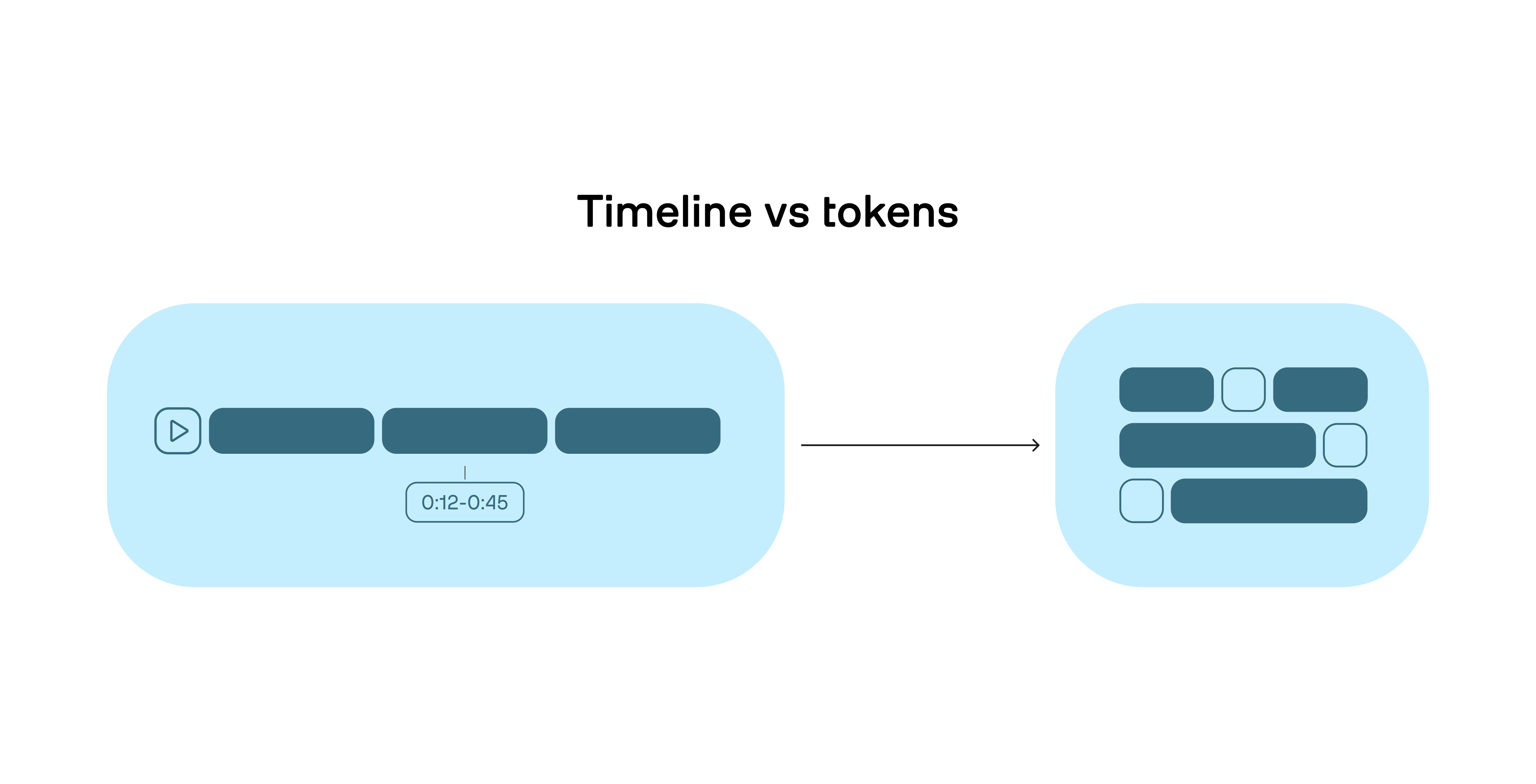
Figure 1: Video is continuous time; LLMs operate on discrete tokens; forcing video into tokens causes information loss.
The hidden requirement in mission video: temporal reasoning
Most people hear “video understanding” and think “recognize objects.” Mission video rarely fails because you couldn’t detect a person or a vehicle. It fails because you couldn’t reason over time, such as:
What happened first, and what happened next?
Did the observed behavior escalate?
What is the causal chain?
Is this a normal pattern of life or an anomaly?
These are timeline questions. You can’t answer them reliably if the model’s internal representation collapses video into a handful of static snapshots or a loosely grounded caption.
Why general-purpose LLMs break on video
This is where it’s important to be precise: general-purpose LLMs are “bad at video” not because they’re unintelligent, but because the common way we feed video into them loses the very information missions require.
There are three core failure modes.
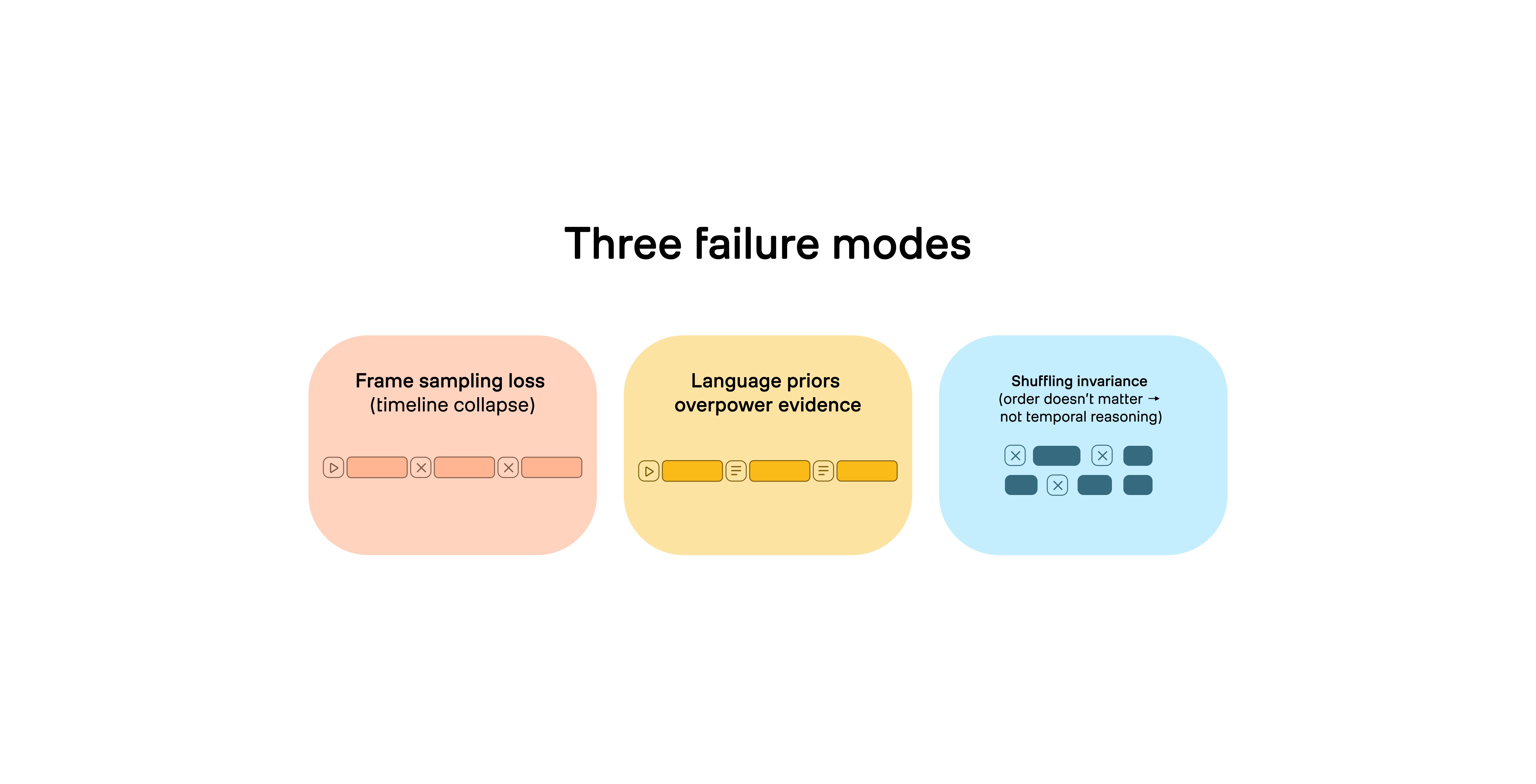
Figure 2: Why “general LLM + sampled frames” fails for video missions.
1 - Frame sampling destroys the timeline
Video is dense. A standard stream might capture ~30 frames per second. But many “video-to-LLM” systems only pass along a tiny fraction of those frames (sometimes as low as ~1 frame per second) because processing every frame is expensive.
The SlowFocus paper makes this explicit: under compute constraints, video LLMs typically need to sparsely sample the original video (e.g., “retaining one frame every second”) and also compress per-frame tokens through adapters; therefore forcing a tradeoff between frame-level detail and video-level temporal coverage.
That tradeoff is not benign. If you throw away most frames, you throw away:
Transitions (what changed)
Fine-grained actions (what someone did, not just what they were)
Causal cues (the “because” between events)
Synchronization (what audio happened at the same time as an action)
For mission workloads, those are the exact cues you care about.
2 - Language priors overpower evidence
LLMs are trained to be fluent. That’s a strength until it becomes a liability.
Apple’s 2025 workshop paper on video LLM benchmarking calls out “strong language priors,” where models can answer questions correctly without watching the video at all.
In a mission setting, “plausible” is not good enough. You need the model to point to what happened in this footage, not what usually happens in the world. This is also why the risk profile feels different in public sector: a confident guess can become an unintentional false positive, a missed event, or a narrative error that cascades into decisions.
3 - Shuffling invariance proves the model isn’t reasoning over time
Here’s a simple test that matters more than many public benchmarks: If you shuffle the frames out of order… does the model still answer the same way?
Apple’s paper also highlights “shuffling invariance,” where some video LLMs maintain similar performance even when frames are temporally shuffled. If a system can’t tell the difference between correct order and shuffled order, it can’t reliably reason about event sequence, escalation, or causality; which are core elements of FMV (Full-Motion Video) exploitation and pattern-of-life analysis.
The production mismatch: wrong context, wrong memory, wrong reasoning
Even when a demo looks good, most general-purpose stacks run into “production gravity” on long-form, mission-scale video:
Wrong context: treating video like tokens tends to lose spatiotemporal continuity.
Wrong memory: “video memory” is not the same as text RAG; missions require retrieval over huge archives with time-aligned evidence.
Wrong reasoning: text-first reasoning struggles with motion and progression unless you supply scoped, time-aligned evidence.
This is why mission video systems don’t win by “prompting harder.” They win by engineering the context a reasoning system can trust.
What specialized video models do differently
A mission-grade video system doesn’t try to force everything through one monolithic prompt. It splits the problem into two roles:
A perception layer that converts raw video into a searchable spatiotemporal representation.
A reasoning/reporting layer that converts selected evidence into grounded, structured outputs.
That division shows up clearly in TwelveLabs models:
Marengo: unify video/image/text/audio into shared representations for “any-to-any” retrieval. This is the “perception engine”.
Pegasus: leverage those representations to turn video into precise text (reports, chapters, summaries). This is the “reasoning and reporting engine”.
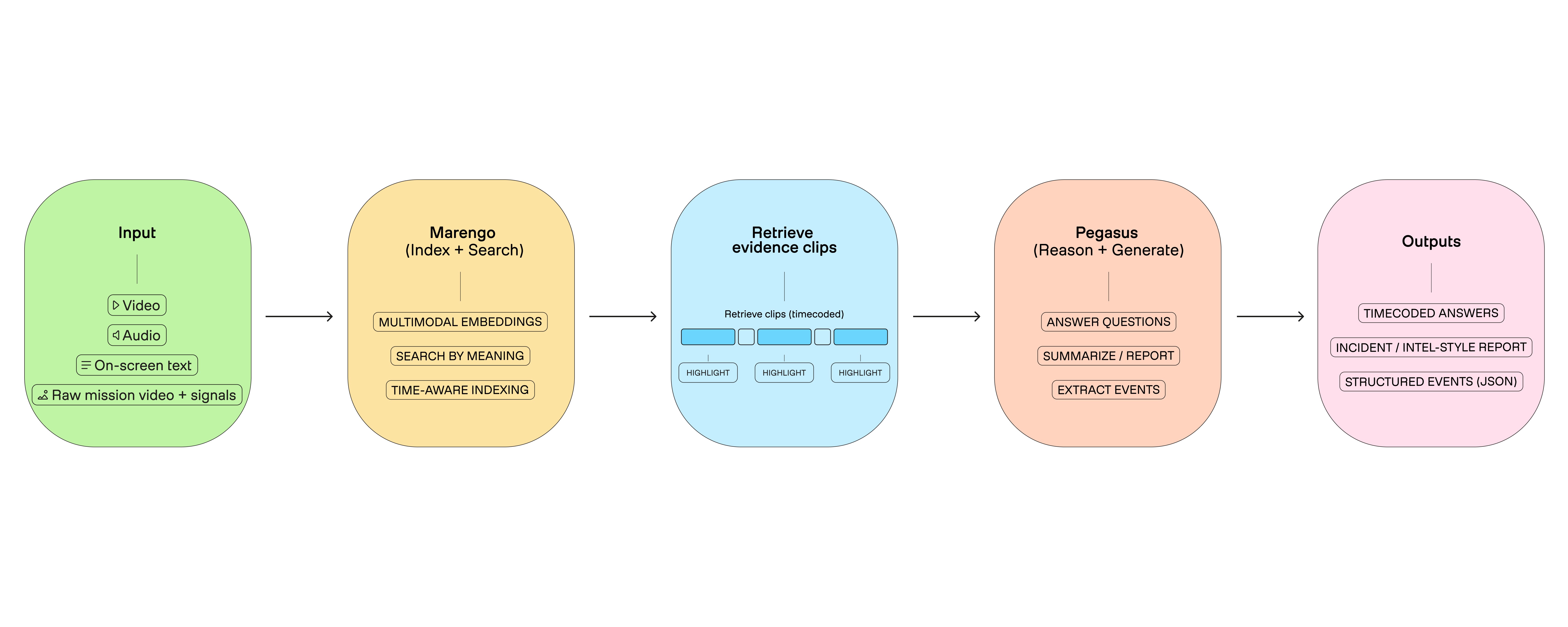
Figure 3: Marengo = video indexing + retrieval, Pegasus = reasoning + outputs.
1 - Marengo: build long-term spatiotemporal memory over video
The mission requirement isn’t “understand this clip.” It’s “operate over corpuses of video with reliability.” That’s why retrieval matters. In the “context engineering” view, retrieval is the core hallucination reduction lever: better selection → less guessing.
Marengo is built to be that retrieval substrate:
It’s a multimodal encoder that turns video, image, text, and audio into unified representations, enabling cross-modal search.
It supports mission-relevant query patterns: entity search, multimedia composed retrieval (image + text), and long-form processing requirements.
From an operational standpoint, this is your “long-term memory” layer: index once, then answer many mission questions quickly by retrieving the right time-bounded segments, rather than repeatedly pushing raw video through a general LLM.
2 - Pegasus: turn retrieved evidence into grounded intelligence products
Once you have evidence clips, the mission question becomes: can the system produce outputs that analysts can trust, review, and integrate?
Pegasus is the video-to-text component that produces structured outputs (chapters, summaries, reports, metadata) aligned to time, returning explanations grounded in multimodal evidence. This enables you to get standardized fields (start, end, label, evidence, confidence) from the evidence clips and support exports suitable for downstream tools.
In mission workflows, an answer without timecodes is a non-answer. This is also why the “output format” discussion is not a cosmetic detail. It determines whether a model can plug into real PED (processing, exploitation, dissemination) workflows.
This requirement maps to auditability. Many common public sector patterns (investigations, incident reconstruction, intelligence reporting, compliance) require:
What happened
Where it happened in the footage
Why it was flagged
What evidence supports it
That’s how you turn AI into an analyst multiplier instead of an opaque narrator.
What to Demand in An Evaluation
In practical public sector terms, specialized video models support workloads like:
Persistent surveillance across multiple feeds, where systems surface activities of interest without requiring continuous human monitoring.
Pattern-of-life analysis via tracking entities across time, detecting anomalies, and constructing timelines.
Post-event forensics: searching archived video to reconstruct event sequences and establish timelines.
If you’re selecting video AI for DoD/IC missions, ask for evaluations that explicitly test temporal reasoning; not just “does it describe a scene.”
Test shuffling invariance and long-form performance, not only aggregate benchmark scores.
Validate representative content (extended FMV, degraded quality, multi-sensor feeds) and specify timeline-anchored output requirements.
Follow this “production constraints” list: long-form processing, entity tracking across scene transitions, temporal queries, near-real-time latency requirements, edge deployment constraints, and interoperability standards.
Conclusion
General-purpose LLMs are transforming how we work with text. But mission video is not text.
Video is a timeline, and the highest-value mission questions depend on temporal reasoning: event order, causality, progression, and long-range dependencies.
When the mission requires evidence, timecodes, and auditability, you need models and infrastructure designed for video from day one: a retrieval substrate that preserves spatiotemporal context, plus a reasoning layer that generates grounded outputs aligned to that timeline.
That is why the choice isn’t “AI vs no AI.” It’s video AI that actually understands time vs systems that only process frames.
Video is not text. It’s a timeline.
If you work in DoD or the Intelligence Community, you already know the uncomfortable truth: we are collecting more video than humans can watch.
ISR platforms, wide-area sensors, fixed cameras, body-worn cameras, drones; everything is becoming a video stream. And the hard part isn’t collecting the footage; it’s turning raw motion imagery into timely, trustworthy intelligence products.
Public reports have described this as an “information deluge” in military intelligence, where analysts risk becoming overwhelmed by the scale of modern collection.
So it’s natural that teams ask: “Can we just put this video into an LLM?”
Sometimes you can get a decent answer for a short clip. But for mission workloads including hours of footage, multiple feeds, real timeline questions (“what happened before/after?”, “who interacted with whom?”, “what changed?”), general-purpose LLMs fail in predictable ways.
And the reason is simple: Text is a sequence of tokens. Video is a spatiotemporal signal.
Figure 1: Video is continuous time; LLMs operate on discrete tokens; forcing video into tokens causes information loss.
The hidden requirement in mission video: temporal reasoning
Most people hear “video understanding” and think “recognize objects.” Mission video rarely fails because you couldn’t detect a person or a vehicle. It fails because you couldn’t reason over time, such as:
What happened first, and what happened next?
Did the observed behavior escalate?
What is the causal chain?
Is this a normal pattern of life or an anomaly?
These are timeline questions. You can’t answer them reliably if the model’s internal representation collapses video into a handful of static snapshots or a loosely grounded caption.
Why general-purpose LLMs break on video
This is where it’s important to be precise: general-purpose LLMs are “bad at video” not because they’re unintelligent, but because the common way we feed video into them loses the very information missions require.
There are three core failure modes.
Figure 2: Why “general LLM + sampled frames” fails for video missions.
1 - Frame sampling destroys the timeline
Video is dense. A standard stream might capture ~30 frames per second. But many “video-to-LLM” systems only pass along a tiny fraction of those frames (sometimes as low as ~1 frame per second) because processing every frame is expensive.
The SlowFocus paper makes this explicit: under compute constraints, video LLMs typically need to sparsely sample the original video (e.g., “retaining one frame every second”) and also compress per-frame tokens through adapters; therefore forcing a tradeoff between frame-level detail and video-level temporal coverage.
That tradeoff is not benign. If you throw away most frames, you throw away:
Transitions (what changed)
Fine-grained actions (what someone did, not just what they were)
Causal cues (the “because” between events)
Synchronization (what audio happened at the same time as an action)
For mission workloads, those are the exact cues you care about.
2 - Language priors overpower evidence
LLMs are trained to be fluent. That’s a strength until it becomes a liability.
Apple’s 2025 workshop paper on video LLM benchmarking calls out “strong language priors,” where models can answer questions correctly without watching the video at all.
In a mission setting, “plausible” is not good enough. You need the model to point to what happened in this footage, not what usually happens in the world. This is also why the risk profile feels different in public sector: a confident guess can become an unintentional false positive, a missed event, or a narrative error that cascades into decisions.
3 - Shuffling invariance proves the model isn’t reasoning over time
Here’s a simple test that matters more than many public benchmarks: If you shuffle the frames out of order… does the model still answer the same way?
Apple’s paper also highlights “shuffling invariance,” where some video LLMs maintain similar performance even when frames are temporally shuffled. If a system can’t tell the difference between correct order and shuffled order, it can’t reliably reason about event sequence, escalation, or causality; which are core elements of FMV (Full-Motion Video) exploitation and pattern-of-life analysis.
The production mismatch: wrong context, wrong memory, wrong reasoning
Even when a demo looks good, most general-purpose stacks run into “production gravity” on long-form, mission-scale video:
Wrong context: treating video like tokens tends to lose spatiotemporal continuity.
Wrong memory: “video memory” is not the same as text RAG; missions require retrieval over huge archives with time-aligned evidence.
Wrong reasoning: text-first reasoning struggles with motion and progression unless you supply scoped, time-aligned evidence.
This is why mission video systems don’t win by “prompting harder.” They win by engineering the context a reasoning system can trust.
What specialized video models do differently
A mission-grade video system doesn’t try to force everything through one monolithic prompt. It splits the problem into two roles:
A perception layer that converts raw video into a searchable spatiotemporal representation.
A reasoning/reporting layer that converts selected evidence into grounded, structured outputs.
That division shows up clearly in TwelveLabs models:
Marengo: unify video/image/text/audio into shared representations for “any-to-any” retrieval. This is the “perception engine”.
Pegasus: leverage those representations to turn video into precise text (reports, chapters, summaries). This is the “reasoning and reporting engine”.
Figure 3: Marengo = video indexing + retrieval, Pegasus = reasoning + outputs.
1 - Marengo: build long-term spatiotemporal memory over video
The mission requirement isn’t “understand this clip.” It’s “operate over corpuses of video with reliability.” That’s why retrieval matters. In the “context engineering” view, retrieval is the core hallucination reduction lever: better selection → less guessing.
Marengo is built to be that retrieval substrate:
It’s a multimodal encoder that turns video, image, text, and audio into unified representations, enabling cross-modal search.
It supports mission-relevant query patterns: entity search, multimedia composed retrieval (image + text), and long-form processing requirements.
From an operational standpoint, this is your “long-term memory” layer: index once, then answer many mission questions quickly by retrieving the right time-bounded segments, rather than repeatedly pushing raw video through a general LLM.
2 - Pegasus: turn retrieved evidence into grounded intelligence products
Once you have evidence clips, the mission question becomes: can the system produce outputs that analysts can trust, review, and integrate?
Pegasus is the video-to-text component that produces structured outputs (chapters, summaries, reports, metadata) aligned to time, returning explanations grounded in multimodal evidence. This enables you to get standardized fields (start, end, label, evidence, confidence) from the evidence clips and support exports suitable for downstream tools.
In mission workflows, an answer without timecodes is a non-answer. This is also why the “output format” discussion is not a cosmetic detail. It determines whether a model can plug into real PED (processing, exploitation, dissemination) workflows.
This requirement maps to auditability. Many common public sector patterns (investigations, incident reconstruction, intelligence reporting, compliance) require:
What happened
Where it happened in the footage
Why it was flagged
What evidence supports it
That’s how you turn AI into an analyst multiplier instead of an opaque narrator.
What to Demand in An Evaluation
In practical public sector terms, specialized video models support workloads like:
Persistent surveillance across multiple feeds, where systems surface activities of interest without requiring continuous human monitoring.
Pattern-of-life analysis via tracking entities across time, detecting anomalies, and constructing timelines.
Post-event forensics: searching archived video to reconstruct event sequences and establish timelines.
If you’re selecting video AI for DoD/IC missions, ask for evaluations that explicitly test temporal reasoning; not just “does it describe a scene.”
Test shuffling invariance and long-form performance, not only aggregate benchmark scores.
Validate representative content (extended FMV, degraded quality, multi-sensor feeds) and specify timeline-anchored output requirements.
Follow this “production constraints” list: long-form processing, entity tracking across scene transitions, temporal queries, near-real-time latency requirements, edge deployment constraints, and interoperability standards.
Conclusion
General-purpose LLMs are transforming how we work with text. But mission video is not text.
Video is a timeline, and the highest-value mission questions depend on temporal reasoning: event order, causality, progression, and long-range dependencies.
When the mission requires evidence, timecodes, and auditability, you need models and infrastructure designed for video from day one: a retrieval substrate that preserves spatiotemporal context, plus a reasoning layer that generates grounded outputs aligned to that timeline.
That is why the choice isn’t “AI vs no AI.” It’s video AI that actually understands time vs systems that only process frames.
Related articles



Platform
Enterprise
© 2021
-
2026
TwelveLabs, Inc. All Rights Reserved

Platform
Enterprise
© 2021
-
2026
TwelveLabs, Inc. All Rights Reserved




Platform
Enterprise
© 2021
-
2026
TwelveLabs, Inc. All Rights Reserved